

リチウムベースのバッテリーパック バッテリー管理システムが必要です (BMS) 温度、電圧、電流、充放電速度、容量、全体的な状態などの重要なパラメータを監視します。過熱や過充電などの問題が検出された場合、BMS はメイン制御システムに冷却を開始するか充電を停止するように警告します。したがって、BMS、デバイス、制御システム間の信頼性の高い通信プロトコルは、運用の安全性と効率性の基礎となります。
バッテリー通信プロトコルの種類
現在、いくつかの通信プロトコルが一般的に使用されており、それぞれに特有の長所があります。
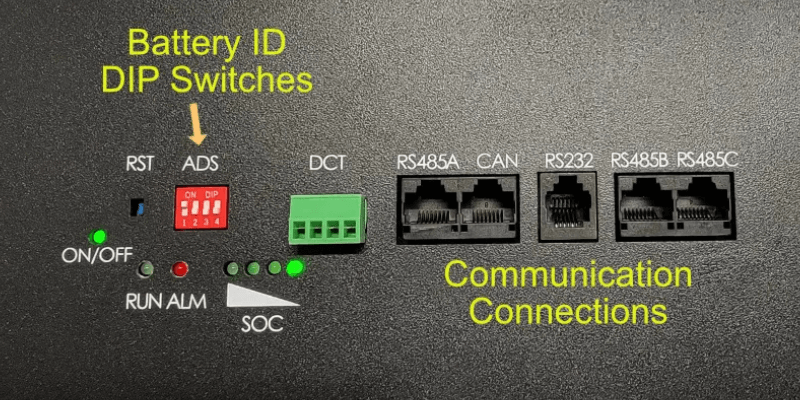
- RS232 は、診断やファームウェアのアップデートなどの短距離のポイントツーポイント接続用です。シンプルですが、サポートするデバイスは 1 つだけで、最大 15 ~ 20 メートルの距離で最適に動作します。
- RS485 は長距離 (最大 1,200 メートル) を処理し、1 つのネットワーク上で複数のデバイスを接続します。騒がしい環境でも安心 – 複数のバッテリーを備えた家庭用エネルギー システムに最適です。
- CAN (コントローラー エリア ネットワーク) は、もともと自動車用に開発され、現在は先進的なエネルギー システムで使用されており、エラー検出機能を備えた高速マルチデバイス通信をサポートします。堅牢ではありますが、セットアップがより複雑で、リアルタイムのデータ交換が必要な大規模または商用アプリケーションに適しています。
- I2C、SMBus、UART などの他のプロトコルは、より単純なニーズを持つ小型デバイス (消費者向けドローンなど) に対応します。 BLE などの無線プロトコルは、短距離監視に使用されます。
適切な通信プロトコルの選択
適切なプロトコルの選択は、特定のニーズによって異なります。すべてに対応できる万能の解決策はありません。システムの規模とシステムで何を行う必要があるかに基づいて選択する必要があります。
ここでは、決定に役立つ 3 つの一般的なプロトコルの簡単な比較を示します。
プロトコル 最大距離 速度 最適な用途
| プロトコル | 最大距離 | スピード | 最適な用途 |
| RS232 | 15~20メートル | 最大115kbps | 診断、簡単なセットアップ |
| RS485 | 1,200m | 最大10Mbps | 複数のバッテリーを備えた家庭用システム |
| できる | 40m(1Mbps時) | 最大1Mbps | 大規模なリアルタイム アプリケーション |
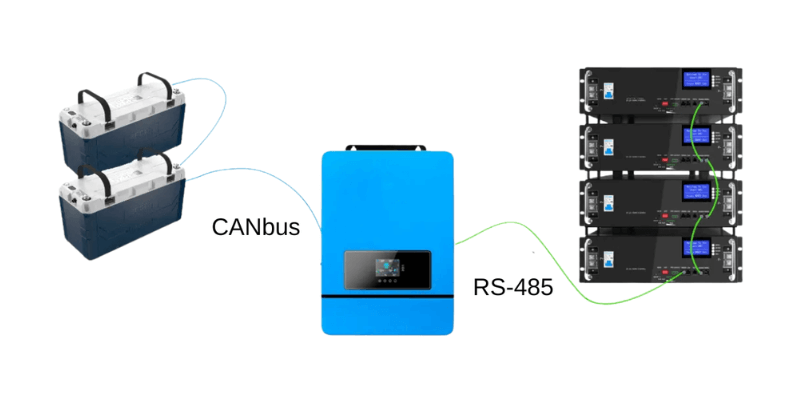
ほとんどのマルチバッテリー ホーム システムでは、RS485 が適切な選択です。大規模で高性能のセットアップでは、複雑さにもかかわらず CAN の方が優れていることがよくあります。通信障害やシステムの問題を避けるために、バッテリーの BMS とインバーターが同じプロトコルを使用していることを確認してください。
バッテリー通信プロトコルの目的
通信プロトコルの主な役割は、データ交換を可能にすることです。これにより、バッテリー管理システム (BMS) がインバーターや監視システムなどの他のデバイスと重要な情報を共有できるようになります。通常、このデータには次のものが含まれます。
- 電圧と電流
- 温度
- 充電状態 (SoC) – エネルギーはどのくらい残っていますか
- 健康状態 (SoH) – バッテリーの全体的な状態
- アラームまたは障害メッセージ
この継続的なデータは、次の 3 つの重要な目的に役立ちます。
- 安全性の向上: BMS は、バッテリーが満杯の場合にインバーターに充電を停止するよう信号を送り、過充電や過熱などの危険を防ぎます。
- 効率の向上: 正確なデータは、充電と放電のサイクルを最適化し、バッテリーをより良く使用するのに役立ちます。
- Prolongs Battery Life: Balanced operation and precise monitoring reduce wear and tear, extending battery life.
Communication Format Guidelines
For smooth communication, everyone in the system must follow the same communication format.
Flow and Sequential Guidelines
Data is sent in organized packets with an address, message, and error-checking method. Protocols define the structure of these data frames.
For example, the CAN protocol uses a frame format with an identifier (priority code), data, and checksum for errors. Communication often follows a sequence; a master device like a computer may request information from slave devices such as batteries in a specific order.
Transmission Fault Detection Guidelines
データ送信に失敗する可能性があります。プロトコルには、これらの障害を検出するためのメソッドが組み込まれています。一般的な方法は巡回冗長検査 (CRC) です。これは、データ パケットの最後に追加される数学的計算です。
受信デバイスも同じ計算を実行します。結果が異なる場合は、送信中にデータが破損したことがわかります。次に、プロトコルは、データの再送信を要求するなど、次に何をするかを指示します。これにより、情報の信頼性が保証されます。
宛先と承認のガイドライン
複数のデバイスが含まれるネットワークでは、それぞれに固有の “住所。” これにより、メッセージが適切な場所に確実に届けられます。たとえば、Modbus ネットワークでは、各バッテリーが 0x01 から 0x0A までの一意のアドレスを持つ場合があります。
確認応答は、メッセージが受信されたことを確認する方法です。一部のプロトコルでは、受信デバイスがメッセージを送り返すシステムを使用します。 “了承” メッセージ。送信者が確認応答を受信しない場合、通信の信頼性を高めるためにメッセージを再送信します。
結論
バッテリー通信プロトコルは、安全で効率的なエネルギー システムに不可欠です。これらは、バッテリー、その管理システム、その他のコンポーネント間の重要なリンクとして機能します。
適切なプロトコルの選択は、システムのサイズとニーズによって異なります。多くの場合、RS485 は家庭に適していますが、CAN は大規模アプリケーションに適しています。重要なのは、システムのすべての部分間の互換性を確保し、データ フロー、エラー チェック、およびアドレス指定に関して確立されたガイドラインに従うことです。
これらのプロトコルは重要なデータ交換を可能にすることで、事故を防止し、パフォーマンスを最大化し、バッテリー投資の寿命を延ばすのに役立ちます。