







AGV-vloten worden vaak stilgelegd tijdens palletliften. Deze herstarts verspillen 60 seconden per gebeurtenis. Operationele teams geven vaak de schuld aan software. De oorzaak is meestal een hoge interne weerstand in de batterijverbindingen.
Hoge weerstand zorgt ervoor dat de busspanning onder de controllerdrempels komt. Hoge ontlading batterij ontwerp lost dit systeemfalen op.
Direct antwoord
Het ontwerp van de batterij met hoge ontlading is gericht op het handhaven van een lage gelijkstroomweerstand (DCR). Lage DCR zorgt voor spanningsstabiliteit tijdens piekbelastingen. Mobiele robots trekken uitbarstingen van 5C tot 20C.
Bij deze snelheden genereren energie-geoptimaliseerde cellen overmatige Joule-warmte (I2R). De resulterende spanningsdaling veroorzaakt onderspanningsblokkering (UVLO) of thermische beveiligingsuitschakelingen.
Succesvolle ontwerpen maken gebruik van krachtige zakcellen met brede lipjes, ultrasoon gelaste puur koperen verbindingen en een GBS bemonstering op 1 kHz. Industriële lithiumbatterijpakketten moeten veiligheidsmisbruiktests doorstaan volgens IEC 62619 (2022). Batterijpakketten die rond deze principes zijn gebouwd, bereiken 2.000 cycli bij een continue temperatuur van 5 °C voordat ze de 80 procent State of Health (SOH) bereiken.
Standaard energiecellen bedienen AGV's die continu op 1C draaien met korte 2C-uitbarstingen. De beslissing hangt af van de daadwerkelijke inschakelduur. Krachtige pakketten worden 20 procent verhandeld energiedichtheid voor een lagere DCR. Registreer het echte huidige profiel voor één volledige dienst voordat u celchemie selecteert.
Belangrijkste afhaalrestaurants
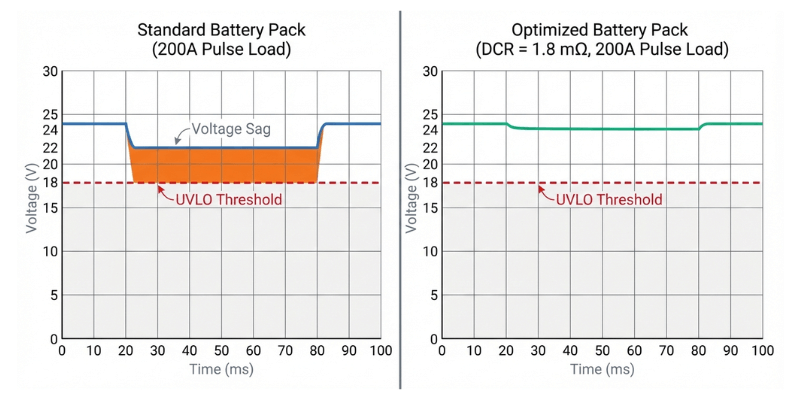
- Spanningsdaling door een hoge DCR zorgt ervoor dat de robot opnieuw opstart. Een uitbarsting van 200 A op een pakket met een totale lusweerstand van 10 mΩ dumpt intern 400 W aan warmte. 24V logische rails vallen binnen 3 seconden onder de 18V. Het vervangen van nikkelstripverbindingen door zuurstofvrije koperen rails en ultrasone lassen reduceert de totale DCR tot 1,8 mΩ. Opnieuw opstarten stopt.
- Standaard BMS-eenheden nemen te langzaam monsters voor motorstall-gebeurtenissen. Kant-en-klare eenheden bemonsteren bij 10 Hz. Motorstall-gebeurtenissen vinden plaats binnen 50 milliseconden. Een 1 kHz bemonsterings-BMS met CAN-bus-feedback naar de motorcontroller beperkt het koppel voordat de cellen 55 graden Celsius bereiken. Dit voorkomt harde cutoffs en onverwachte shutdowns.
- Krachtige pakketten verlagen de totale kosten met 50 procent over een periode van vijf jaar. Standaard energiecellen worden in 500 cycli bij een belasting van 5 graden Celsius afgebroken tot een capaciteit van 80 procent. Krachtige cellen bereiken 2000 cycli. De 35 procent hogere initiële kosten betalen zichzelf binnen 14 maanden terug door minder vervangingen en uitvaltijd.
Waarom hoge DCR robotuitschakelingen veroorzaakt
Interne weerstand zet elektrische energie om in afvalwarmte (P = I2R). Een verdubbeling van de stroom verviervoudigt de warmte. In een robotsysteem dat een piek van 200 A trekt, creëert 10 mΩ totale lusweerstand 400 W aan warmte in de behuizing van het batterijpakket.
Meetopmerking: Gegevens verzameld van 24V 100Ah NMC zakverpakking bij een omgevingstemperatuur van 25 graden Celsius. DCR gemeten via een puls van 10 ms bij 50 procent SOC volgens IEC 62620-methode.
Bij een stroomverbruik van 200A daalt een pakket met 10 mΩ DCR 2V over de interne weerstand. Op een nominaal 24V-systeem zakt de busspanning onder belasting naar 22V. Als de printplaat van de robot een UVLO-drempel van 18 V heeft, duwt de acceleratie bij koude start de spanning voorbij die limiet. De regelaar wordt gereset. De robot stopt.
Streef naar een totale DCR-pakket van minder dan 2 mΩ voor systemen met een piek van meer dan 100 A. DCR-groei blijft het belangrijkste verouderingsmechanisme bij snelle cycli. Een cel die begint bij 0,8 mΩ drijft af naar 1,5 mΩ gedurende 1500 cycli bij 5°C. Ontwerpers moeten plannen maken voor DCR aan het einde van de levensduur. De cel-DCR stijgt met 30 procent bij 0 graden Celsius en met 40 procent aan het einde van de levensduur. Stel doelstellingen voor het begin van de levensduur in op 1,5 mΩ om een veiligheidsmarge te behouden.
Interconnect Engineering: Minimalisering van de lusweerstand
Interconnects dragen in veel systemen voor 30 tot 50 procent bij aan de totale DCR. Standaard nikkelstrips en weerstandspuntlassen creëren knelpunten met hoge weerstand.
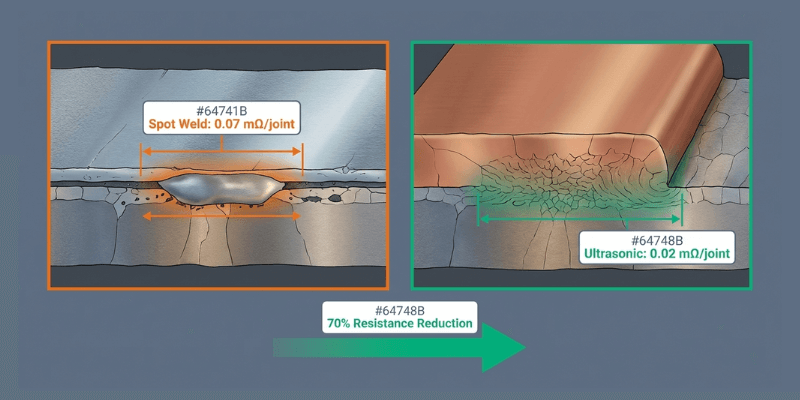
Ultrasoon metaallassen
Ultrasoon lassen creëert een moleculaire binding tussen het cellipje en de busbar. De verbindingsweerstand voor ultrasone lassen bedraagt gemiddeld 0,02 mΩ per verbinding. Weerstandspuntlassen zijn gemiddeld 0,07 mΩ. Per aansluitpunt betekent dit een reductie van 70 procent.
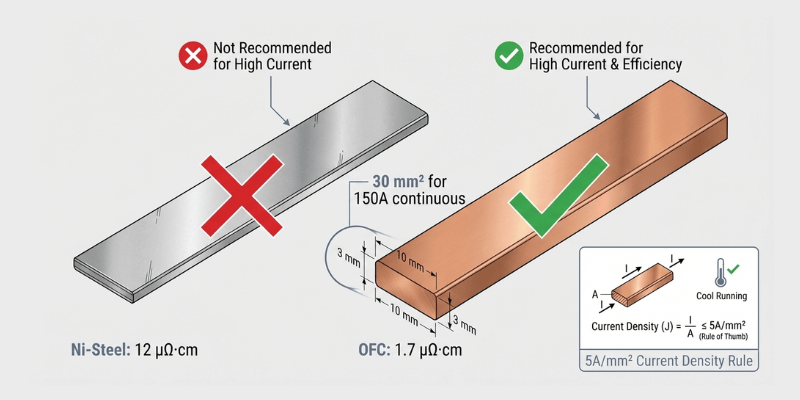
Afmetingen koperen rail
Standaard vernikkeld staal heeft een 7x hogere soortelijke weerstand dan koper. Voor accupakketten met een hoge ontlading is zuurstofvrij koper nodig (C11000). Gebruik een doorsnede die geschikt is voor 5A per vierkante millimeter of minder voor continue belasting. Voor een continue belasting van 150A is 30 vierkante millimeter koper nodig.
Redundante parallelle paden
Parallelle configuraties verlagen de stroom per string en de effectieve pakket-DCR. Een 4P-configuratie met een totaal van 200A zorgt ervoor dat elke string 50A kan verwerken. Hierdoor blijven de cellen op het stabiele gedeelte van de polarisatiecurve en wordt de warmte van de rail verminderd. Volgens SAE J2464 (2021) moeten ingenieurs de integriteit van de verbindingen verifiëren, zowel onder continue als pulsbelasting.
BMS-architectuur: 1 kHz bemonstering en feedback
Robotbelastingen veranderen sneller dan standaard BMS-hardwaretracks. Echte stroomgolfvormen hebben pieken van 200 A die 20 tot 50 milliseconden duren tijdens motorstilstand of piekversnelling.
1 kHz bemonsteringsfrequentie
Het GBS moet elke milliseconde de stroom bemonsteren om motorstall-gebeurtenissen op te vangen. Gebruik speciale stroomgevoelige versterkers met 16-bit ADC's die de BMS-microcontroller op 1 kHz voeden. Langzamere bemonstering mist pieken. Deze pieken de warmtecellen voorbij veilige grenzen.
CAN-buscommunicatie met gesloten lus
Het GBS moet communiceren met de motorcontroller. Wanneer de celtemperatuur 50 graden Celsius bereikt, verzendt het BMS een CAN-bericht met het verzoek om een verlaging van de koppellimiet. Bij 55 graden Celsius hanteert het BMS een harde koppelkap. Deze gegradueerde respons voorkomt uitschakelingen.
Nauwkeurigheid van SOC-schatting
Op spanning gebaseerde schatting van de State of Charge (SOC) mislukt tijdens gebeurtenissen met hoge ontlading. De spanning zakt 2V onder belasting en herstelt zich binnen 30 seconden. Het lezen van de spanning tijdens herstel leidt tot valse SOC-rapportage. Gebruik speciale brandstofmeter-IC's met coulomb-telling en driftcompensatie voor een SOC-nauwkeurigheid van 2 procent.

Thermisch beheer voor duurzame werking
Magazijnrobots draaien dagelijks 16 tot 20 uur. Warmte van hoge ontladingen hoopt zich op in de pakketkern.
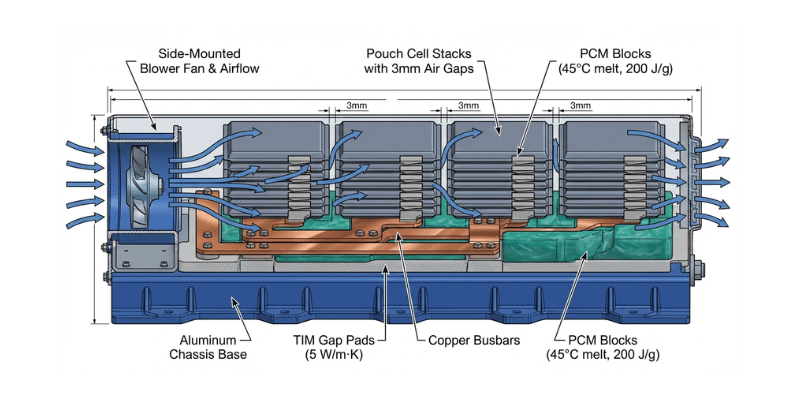
- Thermische interfacematerialen (TIM). Gebruik spleetpads met een hoge geleidbaarheid (5 W/mK) tussen de rails en het aluminium chassis. Zonder TIM houden luchtspleten warmte vast. Temperatuurverschillen tussen rails en het chassis bereiken 15 graden Celsius.
- Faseveranderingsmaterialen (PCM). PCM absorbeert barstwarmte tijdens een acceleratie van 10 graden Celsius. Op paraffine gebaseerde PCM met een smeltpunt van 45 graden Celsius absorbeert 200 J/g tijdens faseovergang. PCM geeft deze warmte langzaam af tijdens retourritten bij 0,5C. De prestaties van paraffine gaan na 2.000 cycli achteruit. Verminder de PCM-capaciteit met 20 procent voor een lange levensduur.
- Actieve luchtstroomkanalen. Ontwerp de interne pakketafstand met een opening van 3 mm tussen de celstapels. Een door het BMS aangestuurde ventilator blaast lucht door deze kanalen. Hierdoor blijven de maximale celtemperaturen onder de 50 graden Celsius.
B2B economische impact: TCO-analyse
Het selecteren van een batterij met laag vermogen voor een robot met hoge ontlading verhoogt de Total Cost of Ownership (TCO).
| Kostenfactor | Standaard energiepakket | Krachtig pakket |
|---|---|---|
| Kosten per verpakkingseenheid | 2.000 USD | 2.700 USD |
| Levensduur bij 5C | 500 cycli | 2.000 cycli |
| Vervangingen (5 jaar) | 4 eenheden | 1 eenheid |
| Totale pakketkosten | 8.000 USD | 2.700 USD |
| Start de downtime opnieuw op | 4.800 USD per jaar | 0 USD per jaar |
| 5 jaar TCO per robot | 32.000 USD | 14.700 USD |
Krachtige cellen verlagen de totale eigendomskosten met 54 procent. Hoge stroomwarmte versnelt de groei van de SEI-laag op de anode. Dikkere SEI verhoogt de DCR. Standaard energiepakketten bereiken 500 cycli tot 80 procent SOH bij 5C-belastingen. Krachtige packs bereiken 2.000 cycli. Elke herstart met spanningsdaling verspilt 90 seconden.
Een vloot van 20 robots die maandelijks 200 picks verliest, resulteert in een efficiëntieverlies van 10.000 dollar. Het selecteren van een partner met diepgaande technische capaciteiten op het gebied van systemen met hoge ontlading (in plaats van eenvoudige montage) is van cruciaal belang voor het realiseren van de hierboven genoemde TCO-voordelen.

Controlelijst voor probleemoplossing
- Meet de totale pakket-DCR op terminals met behulp van een puls van 10 ms. Als DCR groter is dan 5 mΩ op a 24V-systeemzijn interconnecties het knelpunt.
- Haal BMS-logboeken op voor gebeurtenissen met spanningsdip. Uitlezingen binnen 2V van de UVLO-drempel duiden op een toekomstige herstart.
- Inspecteer de verbindingen op schade door hitte. Verkleuring op nikkelstrips duidt op een hoge weerstand.
- Controleer de temperatuurspreiding. Hellingen boven de 5 graden Celsius wijzen op onbalans in de bedrading.
- Registreer het huidige ploegprofiel. Als de piekstroom 80 procent van de nominale burst overschrijdt, worden de cellen overbelast.

Optimaliseer uw robotica-krachtplatform
Dit artikel schetst ontwerpprincipes en zakelijke waarde voor accusystemen met hoge ontlading.
Elk robotplatform is uniek. De optimale stroomoplossing vraagt om maatwerk. Holo Battery biedt uitgebreide batterijoplossingen voor toonaangevende fabrikanten van mobiele robots, van conceptueel ontwerp en prototypetests tot massaproductie. Ons engineeringteam biedt gratis TCO-analyses en voorlopige ontwerpvoorstellen op basis van uw specifieke belastingsprofiel en ruimtelijke beperkingen.
Volgende stap: Stuur de huidige curvegegevens en vereisten voor ruimtelijke afmetingen van uw robot naar sales@holobatery.com. Onze monteurs zullen binnen 24 uur reageren.
FAQ
Waarom wordt de printplaat van de robot gereset tijdens het tillen?
De batterijspanning daalt tot onder de UVLO-drempel. Dit gebeurt wanneer de totale DCR van het batterijpakket te hoog is voor de piekstroom. Inspecteer alle verbindingen op verbindingen met hoge weerstand. Meet de totale lusweerstand op de klemmen onder een pulsbelasting van 10 ms.
Is LFP geschikt voor krachtige robots?
Krachtige LFP-varianten zijn goed voor de robotica als het systeem extra gewicht toestaat. LFP-spanningsstabiliteit helpt de UVLO-marge te behouden. De wisselwerking is een 20 procent lagere energiedichtheid per gewicht vergeleken met NMC.
Moet u supercondensatoren gebruiken voor piekbelastingen?
Supercondensatoren kunnen pieken van 1 tot 5 ms verwerken, zoals het opstarten van een motor. Ze zijn niet in staat langdurige hefoperaties van 2 tot 10 seconden te ondersteunen. Focus eerst op het verlagen van de batterij-DCR door betere cellen en onderlinge verbindingen.