







Le flotte AGV spesso subiscono arresti durante il sollevamento dei pallet. Questi riavvii sprecano 60 secondi per evento. I team operativi spesso incolpano il software. La causa è solitamente l'elevata resistenza interna nelle interconnessioni della batteria.
L'elevata resistenza trascina la tensione del bus al di sotto delle soglie del controller. Scarico elevato progettazione della batteria risolve questo fallimento sistemico.
Risposta diretta
Il design della batteria a scarica elevata si concentra sul mantenimento di una bassa resistenza alla corrente continua (DCR). Il basso DCR garantisce la stabilità della tensione durante i carichi di picco. I robot mobili producono raffiche da 5°C a 20°C.
A queste velocità, le celle ottimizzate dal punto di vista energetico generano un calore Joule eccessivo (I2R). Il conseguente abbassamento di tensione attiva il blocco di sottotensione (UVLO) o gli interruttori di protezione termica.
I progetti di successo utilizzano celle a sacchetto ad alta potenza con linguette larghe, interconnessioni in rame puro saldate ad ultrasuoni e a BMS campionamento a 1 kHz. I pacchi batterie industriali al litio devono superare i test di abuso della sicurezza secondo IEC 62619 (2022). I pacchi batteria costruiti attorno a questi principi raggiungono 2.000 cicli a 5°C continui prima di raggiungere l'80% dello stato di salute (SOH).
Le celle energetiche standard servono gli AGV che funzionano a 1°C continuo con brevi raffiche di 2°C. La decisione dipende dal ciclo di lavoro effettivo. I gruppi ad alta potenza scambiano il 20%. densità di energia per DCR inferiore. Registrare il profilo corrente reale per un turno completo prima di selezionare la chimica cellulare.
Punti chiave
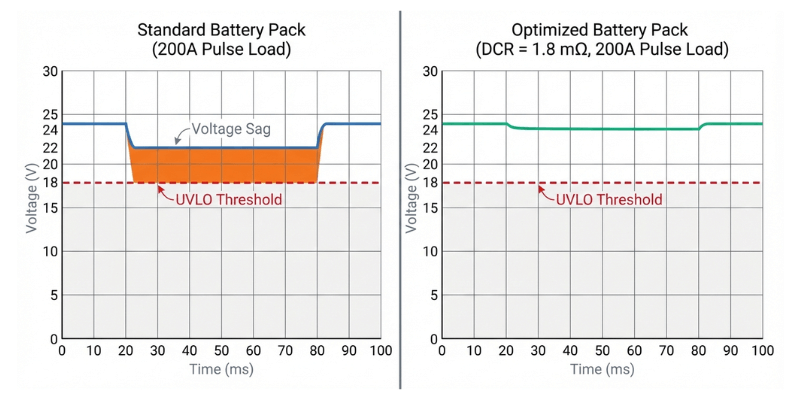
- Il calo di tensione dovuto ad un DCR elevato provoca il riavvio del robot. Un burst da 200 A su un pacco con resistenza totale del circuito di 10 mΩ scarica internamente 400 W di calore. Le linee logiche da 24 V scendono al di sotto di 18 V entro 3 secondi. La sostituzione delle interconnessioni con striscia di nichel con sbarre di rame prive di ossigeno e saldature a ultrasuoni riduce il DCR totale del pacco a 1,8 mΩ. I riavvii si interrompono.
- Le unità BMS standard campionano troppo lentamente per gli eventi di stallo del motore. Campionamento di unità standard a 10 Hz. Gli eventi di stallo del motore si verificano entro 50 millisecondi. Un BMS con campionamento a 1 kHz con feedback del bus CAN al controller del motore riduce la coppia prima che le celle raggiungano i 55 gradi Celsius. Ciò impedisce interruzioni brusche e arresti imprevisti.
- I gruppi ad alta potenza riducono i costi totali del 50% in 5 anni. Le celle energetiche standard si degradano all'80% della capacità in 500 cicli a carichi di 5°C. Le celle ad alta potenza raggiungono i 2.000 cicli. Il costo iniziale superiore del 35% si ammortizza entro 14 mesi grazie alla riduzione delle sostituzioni e dei tempi di inattività.
Perché un DCR elevato provoca l'arresto del robot
La resistenza interna converte l'energia elettrica in calore disperso (P = I2R). Raddoppiando la corrente quadruplica il calore. In un sistema robotico che eroga un picco di 200 A, 10 mΩ di resistenza totale del circuito creano 400 W di calore all'interno dell'involucro del pacco batteria.
Nota sulla misurazione: dati raccolti da 24 V 100 Ah NMC confezione in busta a 25 gradi Celsius ambientali. DCR misurato tramite impulso da 10 ms al 50% SOC secondo il metodo IEC 62620.
Con un assorbimento di 200 A, un pacco con DCR da 10 mΩ fa cadere 2 V attraverso la resistenza interna. Su un sistema a 24 V nominali, la tensione del bus scende a 22 V sotto carico. Se la scheda logica del robot ha una soglia UVLO di 18 V, l'accelerazione con avvio a freddo spinge la tensione oltre tale limite. Il controller si ripristina. Il robot si ferma.
Obiettivo DCR totale del pacco inferiore a 2 mΩ per sistemi superiori a 100 A di picco. La crescita del DCR rimane il principale meccanismo di invecchiamento nel ciclismo ad alto tasso. Una cella che inizia a 0,8 mΩ deriva a 1,5 mΩ in 1.500 cicli a 5°C. I progettisti devono pianificare la DCR a fine vita. Il DCR delle cellule aumenta del 30% a 0 gradi Celsius e del 40% entro la fine della vita. Impostare gli obiettivi di inizio vita a 1,5 mΩ per mantenere un margine di sicurezza.
Ingegneria delle interconnessioni: minimizzare la resistenza del circuito
Le interconnessioni contribuiscono dal 30 al 50% al DCR totale in molti sistemi. Le strisce di nichel standard e le saldature a punti a resistenza creano colli di bottiglia ad alta resistenza.
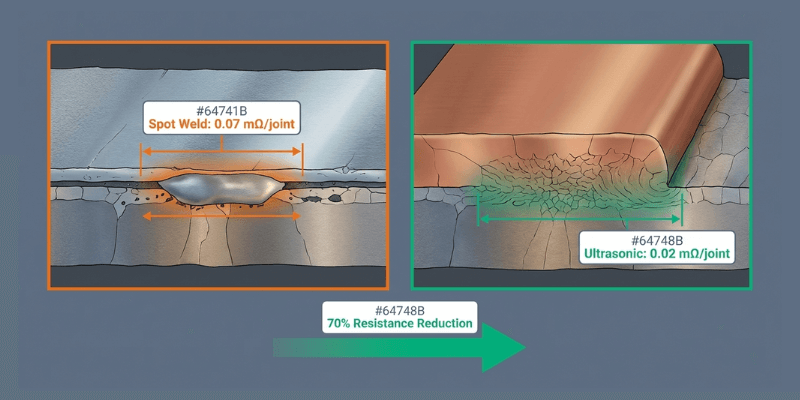
Saldatura dei metalli ad ultrasuoni
La saldatura ad ultrasuoni crea un legame molecolare tra la linguetta della cella e la sbarra collettrice. La resistenza di giunzione per le saldature a ultrasuoni è in media di 0,02 mΩ per giunto. Le saldature a punti di resistenza sono in media di 0,07 mΩ. Ciò corrisponde a una riduzione del 70% per punto di connessione.
Dimensionamento delle sbarre in rame
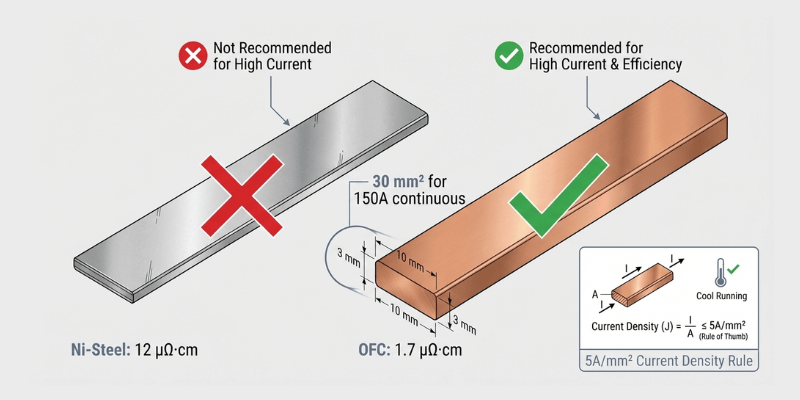
L'acciaio nichelato standard ha una resistività 7 volte superiore rispetto al rame. I pacchi batteria a scarica elevata richiedono rame privo di ossigeno (C11000). Utilizzare una sezione trasversale nominale di 5 A per millimetro quadrato o inferiore per carico continuo. Un carico continuo di 150 A richiede 30 millimetri quadrati di rame.
Percorsi paralleli ridondanti
Le configurazioni in parallelo riducono la corrente per stringa e il DCR effettivo del pacco. Una configurazione 4P a 200 A totali garantisce che ciascuna stringa gestisca 50 A. Ciò mantiene le celle sulla porzione stabile della curva di polarizzazione e riduce il calore delle sbarre. Secondo SAE J2464 (2021), gli ingegneri devono verificare l'integrità dell'interconnessione sia sotto carichi continui che a impulsi.
Architettura BMS: campionamento e feedback a 1 kHz
I carichi dei robot cambiano più velocemente rispetto alle tracce hardware BMS standard. Le forme d'onda della corrente reale hanno picchi da 200 A che durano da 20 a 50 millisecondi durante gli stalli del motore o l'accelerazione di picco.
Frequenza di campionamento di 1 kHz
Il BMS deve campionare la corrente ogni millisecondo per rilevare gli eventi di stallo del motore. Utilizza amplificatori di rilevamento della corrente dedicati con ADC a 16 bit che alimentano il microcontroller BMS a 1 kHz. Il campionamento più lento non rileva i picchi. Questi picchi riscaldano le celle oltre i limiti di sicurezza.
Comunicazione CAN Bus a circuito chiuso
Il BMS deve comunicare con il controller del motore. Quando la temperatura delle celle raggiunge i 50 gradi Celsius, il BMS invia un messaggio CAN richiedendo una riduzione del limite di coppia. A 55 gradi Celsius, il BMS comanda un limite di coppia rigido. Questa risposta graduale previene gli arresti.
Precisione della stima del SOC
La stima dello stato di carica (SOC) basato sulla tensione fallisce durante eventi di scarica elevata. La tensione diminuisce di 2 V sotto carico e si ripristina in 30 secondi. La lettura della tensione durante il ripristino porta a falsi report SOC. Utilizza circuiti integrati indicatori di livello carburante dedicati con conteggio di Coulomb e compensazione della deriva per una precisione SOC del 2%.

Gestione termica per un funzionamento prolungato
I robot del magazzino lavorano dalle 16 alle 20 ore al giorno. Il calore derivante dagli scarichi ad alta velocità si accumula nel nucleo del pacco.
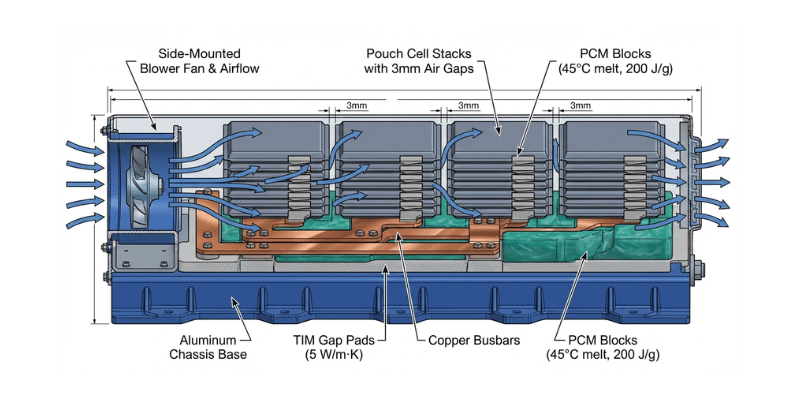
- Materiali di interfaccia termica (TIM). Utilizzare separatori ad alta conduttività (5 W/mK) tra le sbarre collettrici e il telaio in alluminio. Senza TIM, i traferri intrappolano il calore. Le differenze di temperatura tra le sbarre e il telaio raggiungono i 15 gradi Celsius.
- Materiali a cambiamento di fase (PCM). Il PCM assorbe il calore scoppiato durante l'accelerazione di 10°C. Il PCM a base di paraffina con un punto di fusione di 45 gradi Celsius assorbe 200 J/g durante la transizione di fase. Il PCM rilascia questo calore lentamente durante i viaggi di ritorno a 0,5°C. Le prestazioni della paraffina si riducono dopo 2.000 cicli. Declassare la capacità del PCM del 20% per una lunga durata.
- Canali del flusso d'aria attivi. Progettare la spaziatura interna del pacco con spazi di 3 mm tra le pile di celle. Una ventola controllata dal BMS forza l'aria attraverso questi canali. Ciò mantiene le temperature massime delle celle al di sotto di 50 gradi Celsius.
Impatto economico B2B: analisi del TCO
La scelta di una batteria a basso consumo per un robot a scarica elevata aumenta il costo totale di proprietà (TCO).
| Fattore di costo | Pacchetto energetico standard | Pacchetto ad alta potenza |
|---|---|---|
| Costo unitario del pacchetto | 2.000 dollari | 2.700 dollari |
| Ciclo di vita a 5°C | 500 cicli | 2.000 cicli |
| Sostituzioni (5 anni) | 4 unità | 1 unità |
| Costo totale del pacchetto | 8.000 dollari | 2.700 dollari |
| Riavvia i tempi di inattività | 4.800 dollari all'anno | 0 USD all'anno |
| TCO di 5 anni per robot | 32.000 dollari | 14.700 dollari |
Le celle ad alta potenza riducono il costo totale di proprietà del 54%. Il calore ad alta corrente accelera la crescita dello strato SEI sull'anodo. Il SEI più spesso aumenta il DCR. I pacchetti energetici standard raggiungono 500 cicli all'80% di SOH a carichi di 5°C. I gruppi ad alta potenza raggiungono i 2.000 cicli. Ogni riavvio dovuto a un calo di tensione fa perdere 90 secondi.
Una flotta di 20 robot che perde 200 prelievi mensili comporta una perdita di efficienza di 10.000 dollari. La selezione di un partner con competenze ingegneristiche approfondite nei sistemi a scarica elevata (piuttosto che nel semplice assemblaggio) è fondamentale per realizzare i vantaggi in termini di TCO sopra menzionati.

Elenco di controllo per la risoluzione dei problemi
- Misurare il DCR totale del pacco ai terminali utilizzando un impulso di 10 ms. Se DCR supera 5 mΩ su a Sistema a 24 V, le interconnessioni rappresentano il collo di bottiglia.
- Estrai i registri BMS per gli eventi di calo di tensione. Le letture entro 2 V della soglia UVLO indicano un futuro riavvio.
- Ispezionare le interconnessioni per eventuali danni dovuti al calore. Lo scolorimento sulle strisce di nichel indica un'elevata resistenza.
- Controllare la diffusione della temperatura. Gradienti superiori a 5 gradi Celsius indicano uno squilibrio nel cablaggio.
- Registra il profilo corrente del turno. Se la corrente di picco supera l'80% del burst nominale, le celle sono sovraccariche.

Ottimizza la tua piattaforma di potenza robotica
Questo articolo descrive i principi di progettazione e il valore aziendale dei sistemi di batterie a scarica elevata.
Ogni piattaforma robotica è unica. La soluzione energetica ottimale richiede personalizzazione. Holo Battery fornisce soluzioni di batterie complete per i principali produttori di robot mobili, dalla progettazione concettuale e test di prototipi alla produzione di massa. Il nostro team di ingegneri offre analisi TCO gratuite e proposte di progettazione preliminare in base al profilo di carico specifico e ai vincoli spaziali.
Passaggio successivo: invia i dati della curva corrente del robot e i requisiti delle dimensioni spaziali a sales@holobattery.com. I nostri ingegneri risponderanno entro 24 ore.
FAQ
Perché la scheda logica del robot si reimposta durante il sollevamento?
La tensione della batteria scende al di sotto della soglia UVLO. Ciò si verifica quando il DCR totale del pacco batteria è troppo elevato per la corrente di picco. Ispezionare tutte le interconnessioni per individuare eventuali giunti ad alta resistenza. Misurare la resistenza totale del circuito sui terminali sotto un carico di impulsi di 10 ms.
LFP è adatto ai robot ad alta potenza?
Le varianti LFP ad alta potenza sono utili alla robotica se il sistema consente un peso aggiuntivo. La stabilità della tensione LFP aiuta a mantenere il margine UVLO. Il compromesso è una densità energetica inferiore del 20% in peso rispetto a NMC.
Dovresti usare i supercondensatori per i carichi di punta?
I supercondensatori gestiscono picchi da 1 a 5 ms come lo spunto di avvio del motore. Non riescono a supportare operazioni di sollevamento prolungate della durata compresa tra 2 e 10 secondi. Concentrarsi innanzitutto sulla riduzione del DCR della batteria attraverso celle e interconnessioni migliori.