







Les flottes d'AGV subissent souvent des arrêts lors du levage des palettes. Ces redémarrages gaspillent 60 secondes par événement. Les équipes opérationnelles accusent souvent les logiciels. La cause est généralement une résistance interne élevée dans les interconnexions de la batterie.
Une résistance élevée entraîne la tension du bus en dessous des seuils du contrôleur. Haute décharge conception de la batterie résout cet échec systémique.
Réponse directe
La conception de la batterie à décharge élevée vise à maintenir une faible résistance au courant continu (DCR). Le faible DCR garantit la stabilité de la tension pendant les charges de pointe. Les robots mobiles génèrent des rafales de 5°C à 20°C.
À ces taux, les cellules optimisées en énergie génèrent une chaleur Joule excessive (je2R). L'affaissement de tension qui en résulte déclenche un verrouillage en cas de sous-tension (UVLO) ou des coupures de protection thermique.
Les conceptions réussies utilisent des cellules de poche haute puissance avec de larges languettes, des interconnexions en cuivre pur soudées par ultrasons et un GTC échantillonnage à 1 kHz. Les batteries au lithium industrielles doivent réussir les tests de sécurité en cas d'abus conformément à la norme CEI 62619 (2022). Les batteries construites autour de ces principes atteignent 2 000 cycles à 5 °C en continu avant d'atteindre 80 % d'état de santé (SOH).
Les cellules énergétiques standard servent aux AGV fonctionnant à 1C en continu avec de courtes rafales à 2C. La décision dépend du cycle de service réel. Les packs haute puissance s'échangent à 20 pour cent densité énergétique pour un DCR inférieur. Enregistrez le profil actuel réel pour un quart de travail complet avant de sélectionner la chimie cellulaire.
Points clés à retenir
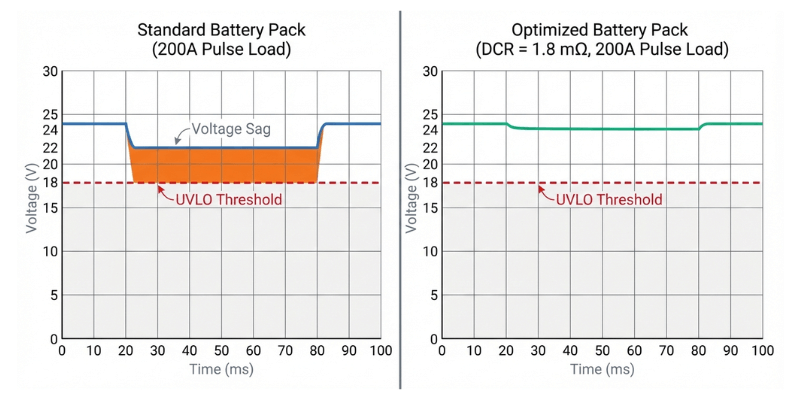
- L'affaissement de tension dû à un DCR élevé provoque le redémarrage du robot. Une rafale de 200 A sur un pack avec une résistance de boucle totale de 10 mΩ évacue 400 W de chaleur en interne. Les rails logiques 24 V descendent en dessous de 18 V en 3 secondes. Le remplacement des interconnexions en bande de nickel par des barres omnibus en cuivre sans oxygène et des soudures par ultrasons réduit le DCR total du pack à 1,8 mΩ. Les redémarrages s'arrêtent.
- Les unités BMS standard échantillonnent trop lentement pour les événements de décrochage du moteur. Les unités disponibles dans le commerce échantillonnent à 10 Hz. Les événements de décrochage du moteur se produisent dans un délai de 50 millisecondes. Un BMS d'échantillonnage de 1 kHz avec retour de bus CAN vers le contrôleur de moteur limite le couple avant que les cellules n'atteignent 55 degrés Celsius. Cela évite les coupures brutales et les arrêts surprises.
- Les packs haute puissance réduisent le coût total de 50 % sur 5 ans. Les cellules énergétiques standard se dégradent jusqu'à 80 % de leur capacité en 500 cycles à des charges de 5 °C. Les cellules haute puissance atteignent 2 000 cycles. Le coût initial 35 % plus élevé est amorti en 14 mois grâce à une réduction des remplacements et des temps d'arrêt.
Pourquoi un DCR élevé provoque des arrêts de robots
La résistance interne convertit l'énergie électrique en chaleur perdue (P = I2R). Doubler le courant quadruple la chaleur. Dans un système robotique tirant une crête de 200 A, 10 mΩ de résistance de boucle totale crée 400 W de chaleur à l'intérieur du boîtier de la batterie.
Note de mesure : données collectées à partir de 24 V 100 Ah NMC pochette à 25 degrés Celsius ambiants. DCR mesuré via une impulsion de 10 ms à 50 % SOC selon la méthode CEI 62620.
À une consommation de 200 A, un pack avec 10 mΩ DCR chute de 2 V aux bornes de la résistance interne. Sur un système nominal de 24 V, la tension du bus chute à 22 V sous charge. Si la carte mère du robot a un seuil UVLO de 18 V, l'accélération du démarrage à froid pousse la tension au-delà de cette limite. Le contrôleur se réinitialise. Le robot s'arrête.
Ciblez un DCR total du pack inférieur à 2 mΩ pour les systèmes au-dessus de 100 A en crête. La croissance du DCR reste le principal mécanisme de vieillissement dans les cycles à haut débit. Une cellule commençant à 0,8 mΩ dérive jusqu'à 1,5 mΩ sur 1 500 cycles à 5°C. Les concepteurs doivent planifier le DCR en fin de vie. Le DCR des cellules augmente de 30 pour cent à 0 degré Celsius et de 40 pour cent en fin de vie. Fixez des objectifs de début de vie à 1,5 mΩ pour maintenir une marge de sécurité.
Ingénierie d'interconnexion : minimiser la résistance de boucle
Les interconnexions contribuent à hauteur de 30 à 50 pour cent au DCR total dans de nombreux systèmes. Les bandes de nickel standard et les soudures par points par résistance créent des goulots d'étranglement à haute résistance.
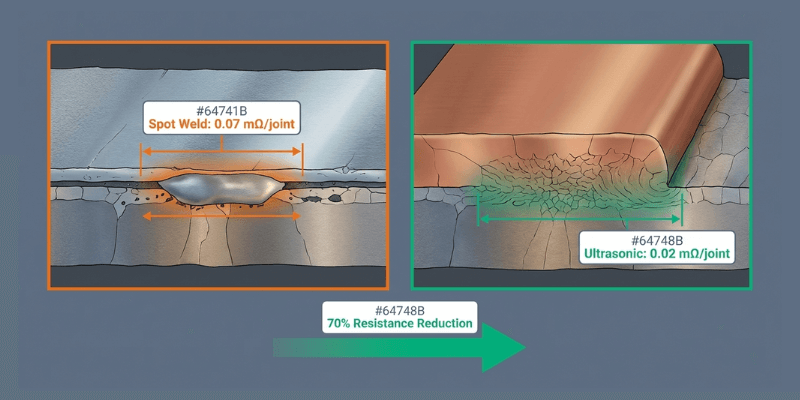
Soudage des métaux par ultrasons
Le soudage par ultrasons crée une liaison moléculaire entre la languette de la cellule et le jeu de barres. La résistance de jonction pour les soudures par ultrasons est en moyenne de 0,02 mΩ par joint. Les soudures par points par résistance sont en moyenne de 0,07 mΩ. Cela représente une réduction de 70 pour cent par point de connexion.
Dimensionnement des barres omnibus en cuivre
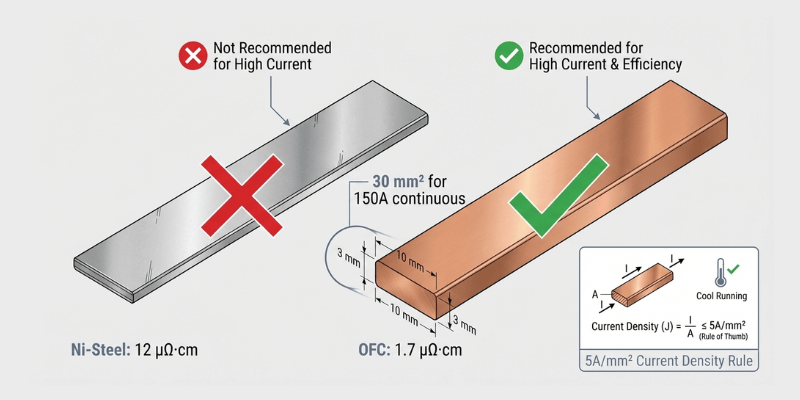
L'acier nickelé standard a une résistivité 7 fois supérieure à celle du cuivre. Les batteries à décharge élevée nécessitent du cuivre sans oxygène (C11000). Utilisez une section nominale de 5 A par millimètre carré ou moins pour une charge continue. Une charge continue de 150 A nécessite 30 millimètres carrés de cuivre.
Chemins parallèles redondants
Les configurations parallèles réduisent le courant par chaîne et le DCR efficace du pack. Une configuration 4P à 200 A au total garantit que chaque chaîne gère 50 A. Cela maintient les cellules sur la partie stable de la courbe de polarisation et réduit la chaleur du jeu de barres. Selon SAE J2464 (2021), les ingénieurs doivent vérifier l'intégrité des interconnexions sous des charges continues et impulsionnelles.
Architecture BMS : échantillonnage et retour à 1 kHz
Les charges du robot changent plus rapidement que les pistes matérielles BMS standard. Les formes d'onde de courant réel présentent des pointes de 200 A d'une durée de 20 à 50 millisecondes lors de calages du moteur ou d'accélérations maximales.
Taux d'échantillonnage de 1 kHz
Le BMS doit échantillonner le courant toutes les millisecondes pour détecter les événements de décrochage du moteur. Utilisez des amplificateurs de détection de courant dédiés avec des CAN 16 bits alimentant le microcontrôleur BMS à 1 kHz. Un échantillonnage plus lent manque les pics. Ces pointes chauffent les cellules au-delà des limites de sécurité.
Communication par bus CAN en boucle fermée
Le BMS doit communiquer avec le contrôleur de moteur. Lorsque la température des cellules atteint 50 degrés Celsius, le BMS envoie un message CAN demandant une réduction de la limite de couple. À 55 degrés Celsius, le BMS commande un plafond de couple dur. Cette réponse graduée évite les arrêts.
Précision de l’estimation du SOC
L’estimation de l’état de charge (SOC) basée sur la tension échoue lors d’événements de décharge élevée. La tension chute de 2 V sous charge et récupère en 30 secondes. La lecture de la tension pendant la récupération entraîne de faux rapports SOC. Utilisez des circuits intégrés de jauge de carburant dédiés avec comptage coulomb et compensation de dérive pour une précision SOC de 2 %.

Gestion thermique pour un fonctionnement durable
Les robots d'entrepôt fonctionnent 16 à 20 heures par jour. La chaleur provenant des décharges à haut débit s'accumule dans le noyau du pack.
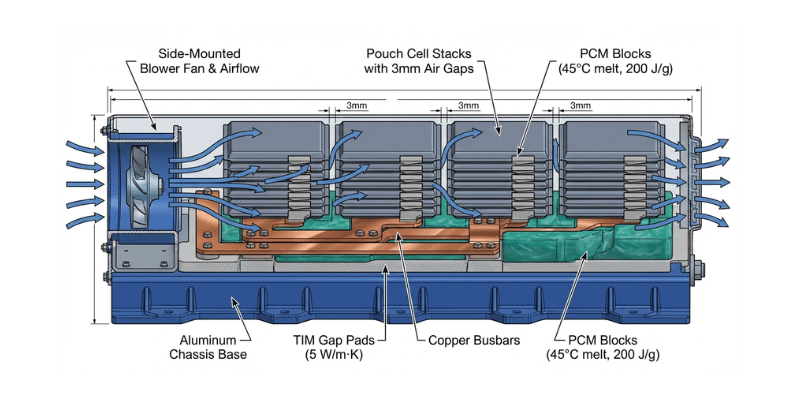
- Matériaux d'interface thermique (TIM). Utilisez des tampons d'espacement à haute conductivité (5 W/mK) entre les jeux de barres et le châssis en aluminium. Sans TIM, les entrefers emprisonnent la chaleur. Les différences de température entre les jeux de barres et le châssis atteignent 15 degrés Celsius.
- Matériaux à changement de phase (PCM). Le PCM absorbe la chaleur éclatée lors d'une accélération de 10 °C. Le PCM à base de paraffine avec un point de fusion de 45 degrés Celsius absorbe 200 J/g pendant la transition de phase. Le PCM libère cette chaleur lentement lors des allers-retours à 0,5C. Les performances de la paraffine se dégradent sur 2 000 cycles. Réduisez la capacité PCM de 20 % pour une longue durée de vie.
- Canaux de circulation d'air actifs. Concevoir un espacement interne des packs avec des espaces de 3 mm entre les piles de cellules. Un ventilateur soufflant contrôlé par le BMS force l’air à travers ces canaux. Cela maintient les températures maximales des cellules en dessous de 50 degrés Celsius.
Impact économique B2B : analyse du TCO
La sélection d'une batterie faible consommation pour un robot à décharge élevée augmente le coût total de possession (TCO).
| Facteur de coût | Pack Énergie Standard | Pack haute puissance |
|---|---|---|
| Coût unitaire du paquet | 2 000 USD | 2 700 USD |
| Cycle de vie à 5°C | 500 cycles | 2 000 cycles |
| Remplacements (5 ans) | 4 unités | 1 unité |
| Coût total du pack | 8 000 USD | 2 700 USD |
| Redémarrer le temps d'arrêt | 4 800 USD par an | 0 USD par an |
| TCO sur 5 ans par robot | 32 000 USD | 14 700 USD |
Les cellules haute puissance réduisent le coût total de possession de 54 %. La chaleur à courant élevé accélère la croissance de la couche SEI sur l'anode. Un SEI plus épais augmente le DCR. Les packs d'énergie standard atteignent 500 cycles à 80 % de SOH à des charges de 5 °C. Les packs haute puissance atteignent 2 000 cycles. Chaque redémarrage en cas de baisse de tension perd 90 secondes.
Une flotte de 20 robots perdant 200 sélections par mois entraîne une perte d'efficacité de 10 000 dollars. La sélection d'un partenaire doté de capacités d'ingénierie approfondies dans les systèmes à forte décharge (plutôt que dans un simple assemblage) est essentielle pour réaliser les avantages en matière de coût total de possession mentionnés ci-dessus.

Liste de contrôle de dépannage
- Mesurez le DCR total du pack aux bornes à l’aide d’une impulsion de 10 ms. Si le DCR dépasse 5 mΩ sur un Système 24V, les interconnexions constituent le goulot d’étranglement.
- Extrayez les journaux BMS pour les événements de chute de tension. Les lectures à moins de 2 V du seuil UVLO indiquent un futur redémarrage.
- Inspectez les interconnexions pour détecter tout dommage dû à la chaleur. La décoloration des bandes de nickel indique une résistance élevée.
- Vérifiez la répartition de la température. Des gradients supérieurs à 5 degrés Celsius indiquent un déséquilibre du câblage.
- Enregistrez le profil actuel du quart de travail. Si le courant de crête dépasse 80 pour cent de la salve nominale, les cellules sont surchargées.

Optimisez votre plateforme de puissance robotique
Cet article décrit les principes de conception et la valeur commerciale des systèmes de batteries à décharge élevée.
Chaque plateforme robotique est unique. La solution d’alimentation optimale nécessite une personnalisation. Holo Battery fournit des solutions de batteries complètes aux principaux fabricants de robots mobiles, depuis la conception conceptuelle et les tests de prototypes jusqu'à la production de masse. Notre équipe d'ingénierie propose une analyse gratuite du TCO et des propositions de conception préliminaires basées sur votre profil de charge spécifique et vos contraintes spatiales.
Étape suivante : Envoyez les données de courbe actuelles de votre robot et les exigences en matière de dimensions spatiales à sales@holobattery.com. Nos ingénieurs vous répondront dans les 24 heures.
FAQ
Pourquoi la carte logique du robot se réinitialise-t-elle pendant le levage ?
La tension de la batterie chute en dessous du seuil UVLO. Cela se produit lorsque le DCR total de la batterie est trop élevé pour le courant de crête. Inspectez toutes les interconnexions pour les joints à haute résistance. Mesurez la résistance totale de la boucle aux bornes sous une charge d’impulsion de 10 ms.
Le LFP convient-il aux robots de grande puissance ?
Les variantes LFP haute puissance servent bien la robotique si le système permet un poids supplémentaire. La stabilité de la tension LFP aide à maintenir la marge UVLO. Le compromis est une densité énergétique en poids inférieure de 20 pour cent par rapport au NMC.
Faut-il utiliser des supercondensateurs pour les charges de pointe ?
Les supercondensateurs gèrent des pics de 1 à 5 ms comme un appel de démarrage de moteur. Ils ne parviennent pas à supporter des opérations de levage soutenues d'une durée de 2 à 10 secondes. Concentrez-vous d’abord sur la réduction du DCR de la batterie grâce à de meilleures cellules et interconnexions.