







Парки AGV часто останавливаются во время подъема поддонов. Эти перезагрузки тратят 60 секунд на одно событие. Операционные команды часто обвиняют программное обеспечение. Причиной обычно является высокое внутреннее сопротивление межсоединений аккумулятора.
Высокое сопротивление снижает напряжение шины ниже пороговых значений контроллера. Высокий разряд конструкция батареи решает этот системный сбой.
Прямой ответ
Конструкция аккумуляторов с высоким разрядом ориентирована на поддержание низкого сопротивления постоянному току (DCR). Низкий DCR обеспечивает стабильность напряжения при пиковых нагрузках. Мобильные роботы выдерживают импульсы от 5C до 20C.
При таких скоростях клетки с оптимизированной энергией генерируют избыточное джоулево тепло (I2Р). Возникающее в результате падение напряжения приводит к срабатыванию блокировки при пониженном напряжении (UVLO) или отключению тепловой защиты.
В успешных конструкциях используются мощные пакетные элементы с широкими выступами, межсоединения из чистой меди, сваренные ультразвуком, и БМС дискретизация на частоте 1 кГц. Промышленные литиевые аккумуляторы должны пройти испытания на безопасность в соответствии со стандартом IEC 62619 (2022). Аккумуляторные батареи, построенные на основе этих принципов, выдерживают 2000 циклов непрерывной работы при температуре 5C, прежде чем достичь 80-процентного состояния работоспособности (SOH).
Стандартные энергоячейки обслуживают AGV, работающие при постоянном токе 1C с короткими всплесками напряжения 2C. Решение зависит от фактического рабочего цикла. Аккумуляторы высокой мощности продаются на 20 процентов плотность энергии для нижнего DCR. Прежде чем выбирать клеточный химический состав, запишите реальный текущий профиль за одну полную смену.
Ключевые выводы
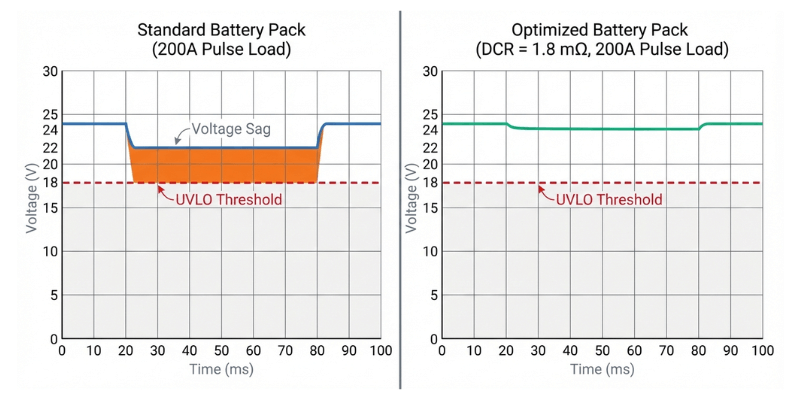
- Падение напряжения из-за высокого значения DCR приводит к перезагрузке робота. Взрыв 200 А на блоке с общим сопротивлением контура 10 мОм выделяет внутри 400 Вт тепла. Напряжение на логических шинах 24 В падает ниже 18 В в течение 3 секунд. Замена межсоединений из никелевых лент шинами из бескислородной меди и ультразвуковой сваркой снижает общее сопротивление DCR упаковки до 1,8 мОм. Перезагрузки прекращаются.
- Стандартные устройства BMS слишком медленно производят выборку данных при остановке двигателя. Стандартные устройства производят выборку с частотой 10 Гц. События остановки двигателя происходят в течение 50 миллисекунд. Система BMS с частотой выборки 1 кГц и обратной связью по шине CAN, подаваемой на контроллер двигателя, регулирует крутящий момент до того, как элементы достигнут температуры 55 градусов Цельсия. Это предотвращает резкие отключения и внезапные отключения.
- Блоки высокой мощности снижают общую стоимость на 50 процентов за 5 лет. Стандартные энергоэлементы теряют свою емкость до 80 процентов за 500 циклов при нагрузке 5C. Мощные элементы достигают 2000 циклов. Увеличение первоначальных затрат на 35 процентов окупается в течение 14 месяцев за счет сокращения замен и простоев.
Почему высокий DCR вызывает остановку робота
Внутреннее сопротивление преобразует электрическую энергию в отходящее тепло (P = I2Р). Удвоение тока увеличивает тепло в четыре раза. В роботизированной системе, потребляющей пиковый ток 200 А, общее сопротивление контура 10 мОм создает 400 Вт тепла внутри корпуса аккумуляторного блока.
Примечание по измерениям: данные собраны с источника питания 24 В, 100 Ач. NMC пакетную упаковку при температуре окружающей среды 25 градусов Цельсия. DCR измерен с помощью импульса длительностью 10 мс при 50-процентном SOC по методу IEC 62620.
При потреблении тока 200 А блок с DCR сопротивлением 10 мОм падает на 2 В на внутреннем сопротивлении. В системе с номинальным напряжением 24 В под нагрузкой напряжение на шине падает до 22 В. Если материнская плата робота имеет порог UVLO 18 В, ускорение при холодном запуске поднимает напряжение выше этого предела. Контроллер перезагружается. Робот останавливается.
Целевое общее DCR пакета ниже 2 мОм для систем с пиковым током выше 100 А. Рост DCR остается основным механизмом старения при высокоскоростном велоспорте. Сопротивление ячейки, начиная с 0,8 мОм, дрейфует до 1,5 мОм за 1500 циклов при 5C. Проектировщики должны планировать DCR по окончании срока службы. DCR клеток увеличивается на 30 процентов при 0 градусах Цельсия и на 40 процентов к концу жизни. Установите начальное значение сопротивления 1,5 мОм, чтобы сохранить запас прочности.
Проектирование межсоединений: минимизация сопротивления шлейфа
Межсоединения составляют от 30 до 50 процентов общего DCR во многих системах. Стандартные никелевые полосы и контактная точечная сварка создают узкие места с высоким сопротивлением.
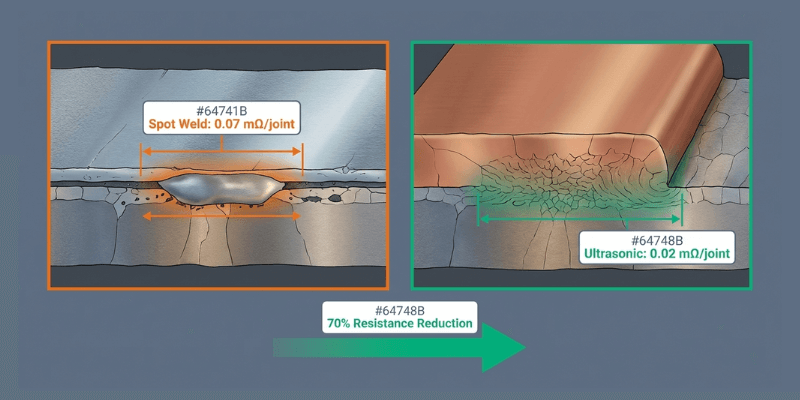
Ультразвуковая сварка металлов
Ультразвуковая сварка создает молекулярную связь между вкладкой ячейки и шиной. Сопротивление соединения ультразвуковой сварки составляет в среднем 0,02 мОм на соединение. Сопротивление точечной сварки составляет в среднем 0,07 мОм. Это представляет собой 70-процентное сокращение на одну точку подключения.
Определение размеров медных шин
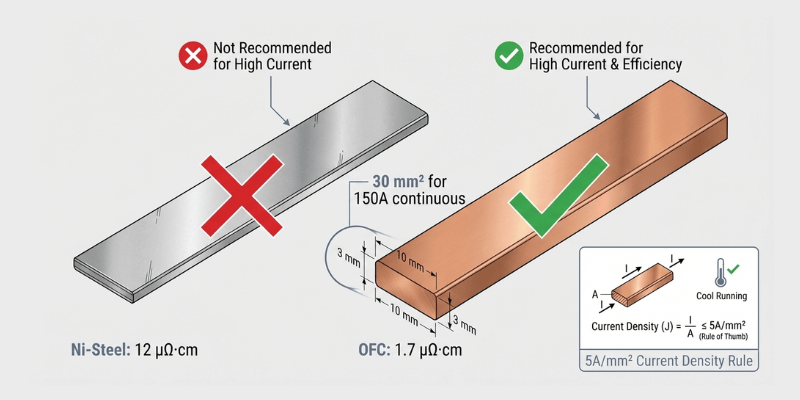
Стандартная никелированная сталь имеет удельное сопротивление в 7 раз выше, чем медь. Для аккумуляторов с высоким разрядом требуется бескислородная медь (C11000). Для постоянной нагрузки используйте поперечное сечение, рассчитанное на ток 5 А на квадратный миллиметр или меньше. Для продолжительной нагрузки в 150 А требуется 30 квадратных миллиметров меди.
Избыточные параллельные пути
Параллельные конфигурации снижают ток на цепочку и эффективный пакетный DCR. Конфигурация 4P с общим током 200 А гарантирует, что каждая цепочка выдерживает ток 50 А. Это удерживает ячейки на стабильном участке поляризационной кривой и снижает нагрев шин. Согласно SAE J2464 (2021), инженеры должны проверять целостность межсоединений как при постоянных, так и при импульсных нагрузках.
Архитектура BMS: дискретизация 1 кГц и обратная связь
Нагрузки робота меняются быстрее, чем стандартные аппаратные средства BMS. Реальные сигналы тока имеют всплески силой 200 А длительностью от 20 до 50 миллисекунд во время остановки двигателя или пикового ускорения.
Частота дискретизации 1 кГц
BMS должна измерять ток каждую миллисекунду, чтобы обнаружить события остановки двигателя. Используйте специальные усилители измерения тока с 16-битными АЦП, питающими микроконтроллер BMS на частоте 1 кГц. Более медленная выборка пропускает всплески. Эти шипы нагревают ячейки за безопасные пределы.
Замкнутая связь по шине CAN
BMS должна обмениваться данными с контроллером двигателя. Когда температура элемента достигает 50 градусов Цельсия, BMS отправляет сообщение CAN с запросом на снижение предела крутящего момента. При 55 градусах Цельсия BMS требует жесткого ограничения крутящего момента. Эта градуированная реакция предотвращает отключения.
Точность оценки SOC
Оценка состояния заряда (SOC) на основе напряжения не работает во время событий сильного разряда. Напряжение падает на 2 В под нагрузкой и восстанавливается в течение 30 секунд. Чтение напряжения во время восстановления приводит к ложному сообщению о SOC. Используйте специальные микросхемы указателя уровня топлива с кулоновским счетчиком и компенсацией дрейфа для обеспечения точности SOC 2%.

Управление температурным режимом для устойчивой работы
Складские роботы работают от 16 до 20 часов в день. Тепло от быстрых разрядов накапливается в ядре пакета.
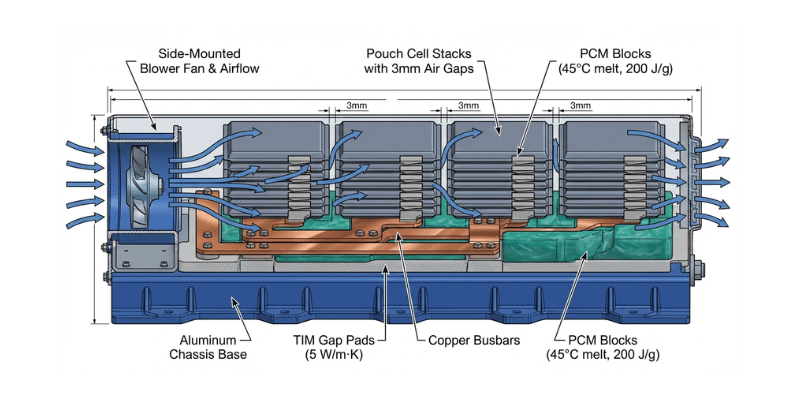
- Материалы термоинтерфейса (ТИМ). Используйте зазорные площадки с высокой проводимостью (5 Вт/мК) между шинами и алюминиевым шасси. Без TIM воздушные зазоры удерживают тепло. Перепады температур между шинами и шасси достигают 15 градусов Цельсия.
- Материалы с фазовым переходом (PCM). PCM поглощает выброс тепла при ускорении на 10°C. ПКМ на основе парафина с температурой плавления 45 градусов Цельсия поглощает 200 Дж/г во время фазового перехода. PCM медленно выделяет это тепло во время обратного пути при температуре 0,5°C. Характеристики парафина ухудшаются после 2000 циклов. Уменьшите мощность PCM на 20 процентов для увеличения срока службы.
- Активные каналы воздушного потока. Расположите внутреннее расстояние между упаковками с зазорами 3 мм между стопками ячеек. Вентилятор, управляемый системой BMS, нагнетает воздух через эти каналы. Это позволяет поддерживать пиковую температуру элементов ниже 50 градусов по Цельсию.
Экономический эффект B2B: анализ совокупной стоимости владения
Выбор маломощной батареи для робота с высоким разрядом увеличивает совокупную стоимость владения (TCO).
| Фактор стоимости | Стандартный энергетический пакет | Мощный пакет |
|---|---|---|
| Стоимость единицы упаковки | 2000 долларов США | 2700 долларов США |
| Цикл жизни при 5C | 500 циклов | 2000 циклов |
| Замены (5 лет) | 4 единицы | 1 единица |
| Общая стоимость пакета | 8000 долларов США | 2700 долларов США |
| Перезагрузить время простоя | 4800 долларов США в год | 0 долларов США в год |
| 5-летняя совокупная стоимость владения на робота | 32 000 долларов США | 14 700 долларов США |
Ячейки высокой мощности снижают общую стоимость владения на 54 процента. Сильноточное тепло ускоряет рост слоя SEI на аноде. Более толстый SEI увеличивает DCR. Стандартные энергоблоки достигают 500 циклов при SOH 80 процентов при нагрузке 5C. Мощные блоки достигают 2000 циклов. Каждая перезагрузка при провале напряжения тратит впустую 90 секунд.
Парк из 20 роботов, ежемесячно теряющий 200 подборщиков, приводит к потере эффективности в 10 000 долларов. Выбор партнера с глубокими инженерными возможностями в системах с высоким расходом (а не простой сборкой) имеет решающее значение для реализации упомянутых выше преимуществ совокупной стоимости владения.

Контрольный список устранения неполадок
- Измерьте общий DCR упаковки на клеммах, используя импульс длительностью 10 мс. Если DCR превышает 5 мОм на система 24 Вузким местом являются межсоединения.
- Извлеките журналы BMS на предмет событий падения напряжения. Показания в пределах 2 В от порога UVLO указывают на будущую перезагрузку.
- Осмотрите межсоединения на предмет тепловых повреждений. Изменение цвета никелевых полосок указывает на высокую стойкость.
- Проверьте разброс температур. Градиенты выше 5 градусов по Цельсию указывают на дисбаланс проводки.
- Зарегистрируйте текущий профиль смещения. Если пиковый ток превышает 80 процентов номинального пикового значения, элементы перегружены.

Оптимизируйте свою силовую платформу робототехники
В этой статье излагаются принципы проектирования и коммерческая ценность аккумуляторных систем с высоким разрядом.
Каждая роботизированная платформа уникальна. Оптимальное решение по электропитанию требует индивидуальной настройки. Holo Battery предлагает комплексные аккумуляторные решения для ведущих производителей мобильных роботов, от концептуального проектирования и тестирования прототипов до массового производства. Наша команда инженеров предлагает бесплатный анализ совокупной стоимости владения и предварительные проектные предложения с учетом вашего конкретного профиля нагрузки и пространственных ограничений.
Следующий шаг: отправьте данные кривой тока вашего робота и требования к пространственным размерам на sales@holobattery.com. Наши инженеры ответят в течение 24 часов.
Часто задаваемые вопросы
Почему логическая плата робота сбрасывается во время подъема?
Напряжение аккумулятора падает ниже порога UVLO. Это происходит, когда общий DCR аккумуляторной батареи слишком высок для пикового тока. Осмотрите все межсоединения на предмет соединений с высоким сопротивлением. Измерьте общее сопротивление контура на клеммах при импульсной нагрузке длительностью 10 мс.
Подходит ли LFP для мощных роботов?
Варианты LFP высокой мощности хорошо подходят для робототехники, если система допускает дополнительный вес. Стабильность напряжения LFP помогает поддерживать запас UVLO. Компромиссом является снижение плотности энергии по весу на 20 процентов по сравнению с NMC.
Стоит ли использовать суперконденсаторы при пиковых нагрузках?
Суперконденсаторы выдерживают пики длительностью от 1 до 5 мс, такие как пуск двигателя. Они не поддерживают длительные операции подъема продолжительностью от 2 до 10 секунд. В первую очередь сосредоточьтесь на снижении DCR батареи за счет улучшения ячеек и межсоединений.